Problemstellung
Bei feinfühligen Manipulationen von Montagevorgängen kann es aufgrund von Unsicherheiten zu Verklemmungen kommen, die vermieden werden sollten.
Ziel
Zur Vermeidung von Verklemmungen kann von Mensch-inspirierten Fähigkeiten bei der Steck-Montage gelernt werden.
Lösungskompetenz
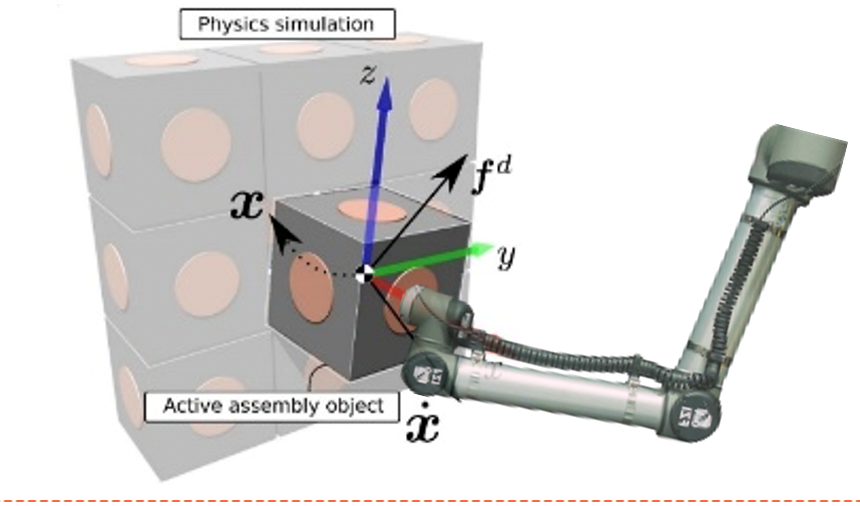
Es wird ein adaptives Regelungskonzept mithilfe neuronaler Netze (RNNs) entwickelt, die über ein Long short-term memory (LSTM) verfügen, also ein langes Kurzzeitgedächtnis, welches sich Vorgänge merken und basierend darauf lernen kann. Außerdem wird kartesische Kraftregelung mit Vorwärts-Dynamik eingesetzt. Ein initiales und sicheres Lernen wird durch menschliche Teleoperation in der Simulation gewährleistet. Ein robuster Sim2Real-Transfer ermöglicht den einfachen und schnellen Einsatz in realen Anwendungen.
Erprobungsumgebung
Da die Controller über Open Source Lizenzen verfügbar sind, ist ein schneller Transfer in die Produktion möglich.