Ausgangssituation
Die PLC2 ist autorisierter Trainingspartner für FPGA Technologien von Xilinx Inc. sowie für SoC/MPSoC Architekturen. Seit einigen Jahren bietet PLC2 kundenspezifische FPGA und SoC/MPSoC Lösungen sowie Hardwarebeschleuniger an. Umfangreiche Expertise mit bildgebenden Fahrerassistenzsystemen (ADAS) für automatisiertes Fahren und Datenlogging machen PLC2 hierdurch zu einem herausragenden Industriepartner für sämtliche Entwicklungen im Automotive Bildverarbeitungsbereich auf echtzeitfähigen Hardwarestrukturen.
Problemstellung
Traditionelle SoC/MPSoC Lösungen stoßen durch den stetig steigenden Einsatz und die hohen Leistungsanforderungen von künstlichen neuronalen Netzen (KNN) an ihre Grenzen. Das gilt insbesondere für die Anwendung von Deep Learning im Kontext automatisierter Fahrzeuge mit kritischen Anforderungen an die Echtzeitfähigkeit und Energieeffizienz. Neue auf die Anwendung abgestimmte SoC/MPSoC Architekturen sowie ganzheitliche Entwurfsverfahren sind notwendig.
Lösungsansatz
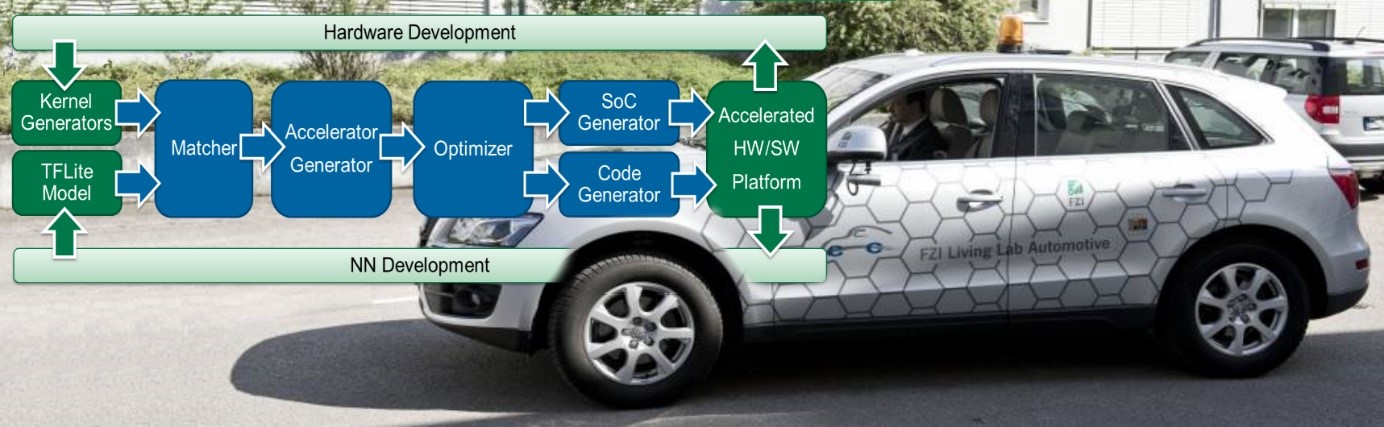
Lösung versprechen ganzheitliche Ansätze wie Vitis AI, in Kombination mit der Versal Architektur, für welche PLC2 als early access Kunde Expertise aufbauen konnte, sowie das im Quick-Check betrachtete NeMoH-Framework, zur automatisierten Generierung von hardwarebeschleunigten SoC-Plattformen. Beide Ansätze verbinden ein effizientes Co-Design, das neben dem komplexen Deployment auf heterogenen Plattformen auch die Optimierung des Netzes für die vorliegende Hardwarearchitektur, bei gegebenen Qualitätsanforderungen, erlaubt. Die Ansätze erlauben das Einbeziehen komplexer, heterogene Plattformen mit anwendungsspezifischen Beschleunigerarchitekturen.
Quick-Check-Ergebnisse
Im Rahmen des Quick-Checks wurden aktuelle Trends bei der Entwicklung automatisierten Fahrens vorgestellt und die generelle Herangehensweise und Herausforderungen bei der Entwicklung von KNNs vorgestellt. Ergänzend wurde ein generator-basierter RISC-V Plattformentwurf vorgestellt, welcher es erlaubt auf KNNs, insbesondere auf Tensorflow Lite Modelle, abgestimmte Hardware-Plattformen zu entwickeln. Bei der Betrachtung wurde die Integration in die Forschungslandschaft und der Vergleich von existierenden Tools für die Evaluation im industriellen Bereich sowie die Bedürfnisse an die Architektur mit betrachtet. Middleware-Architekturen wie das Robot Operating System (ROS) erlauben dabei einen Aufbau einer effizienten Toolchain zum Erstellen der Modelle sowie eine einfache Rapid Prototyping Umgebung, um die entwickelten Modelle in Fahrzeuge zu integrieren.