Initial Situation
PLC2 is an authorized training partner for FPGA technologies from Xilinx Inc. as well as for SoC/MPSoC architectures. PLC2 has been providing custom FPGA and SoC/MPSoC as well as hardware accelerators solutions for several years. The combination with extensive expertise in imaging ADAS systems for automated driving and data logging, makes PLC2 an outstanding industry partner for all developments for automotive image processing with on real-time capable hardware architectures.
Problem definition
The continuously increasing use and performance requirements of artificial neural networks, especially deep learning, in automated vehicles, combined with critical requirements for real-time capability and energy efficiency, are pushing traditional SoC/MPSoC to their limits. New application specific SoC/MPSoC architectures as well as holistic design methods are required for this domain.
Solution
Holistic approaches such as Vitis AI, in combination with the Versal architecture, for which PLC2 was able to build expertise as an early access customer, as well as the NeMoH framework considered in the Quick Check, for the automatic generation of hardware-accelerated SoC platforms are promising solutions. Both approaches combine an efficient co-design, which, in addition to the complex deployment on heterogeneous platforms, enable the optimization of the neuronal network, with regard to specific quality requirements. The approaches support complex, heterogeneous platforms with application-specific accelerator architectures.
QuickCheck Results
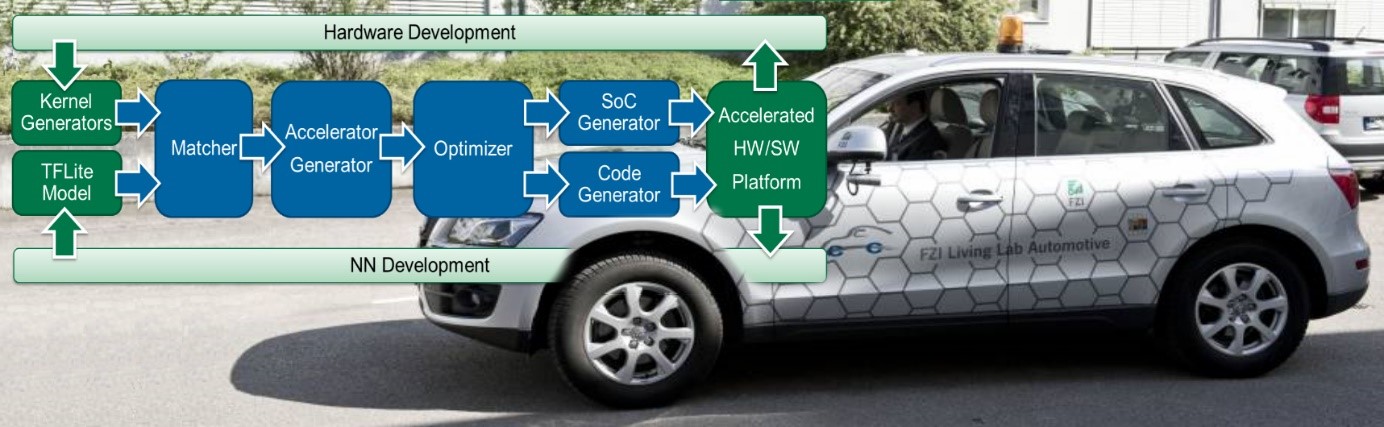
The QuickCheck surveys current trends in the development of automated driving as well as general approaches and challenges during development of ANNs. Focus is on a generator-based RISC-V platform design process, which enables the development of ANN specific hardware platforms, more precisely specific to a dedicated Tensorflow Lite model. The integration into the research landscape and the comparison of existing tools for the evaluation in the industrial area as well as the needs of the architecture were considered. Middleware architectures such as the Robot Operating System (ROS) allow an efficient toolchain to be set up for creating the models and a simple rapid prototyping environment to integrate the developed models into vehicles.